
-
- Downloads
Merge branch 'master' of https://gitlab.henriktjader.com/e7020e_2021_group_edwkll-7/gaming_mouse
No related branches found
No related tags found
Showing
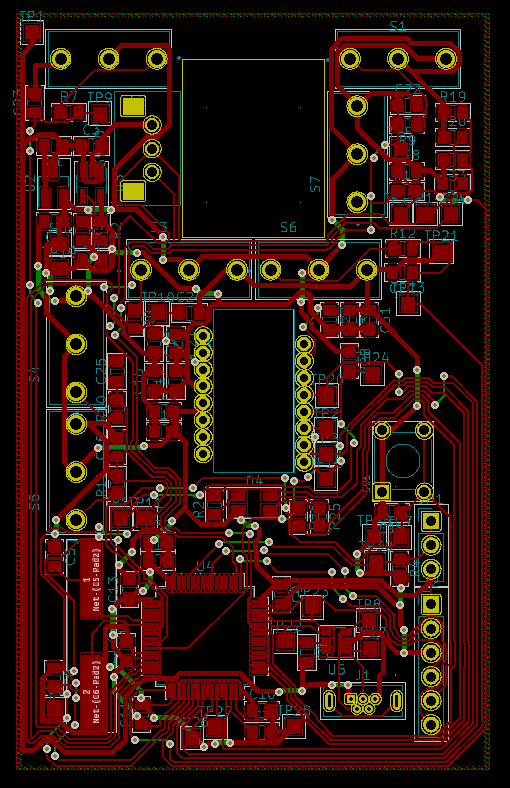
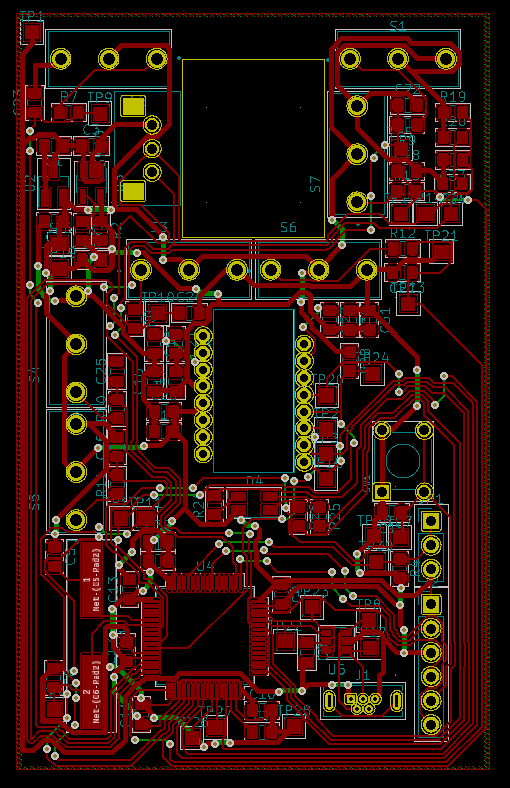
- Pictures/board_footprints.png 0 additions, 0 deletionsPictures/board_footprints.png
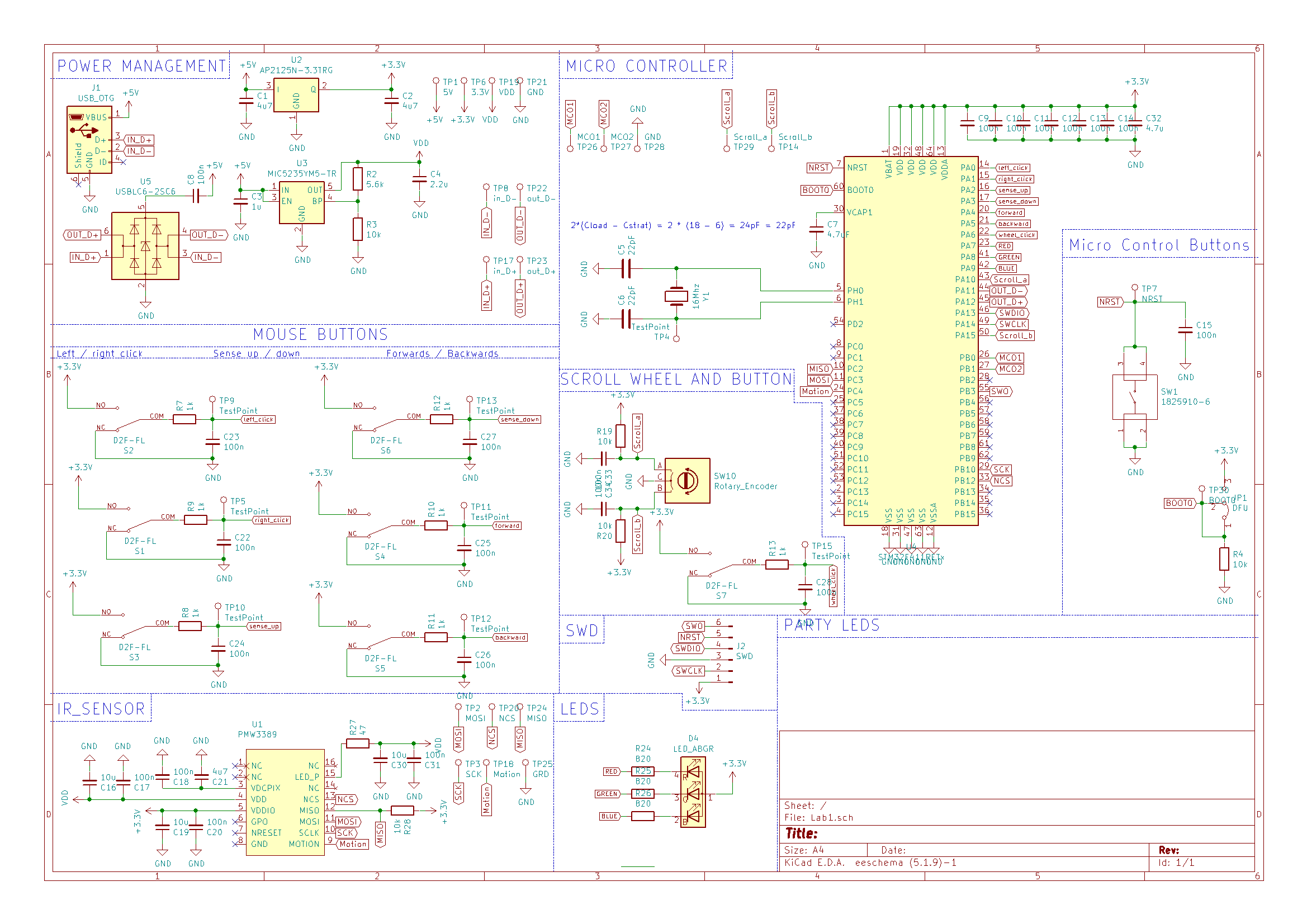
- Pictures/board_schematic.png 0 additions, 0 deletionsPictures/board_schematic.png
- README.md 15 additions, 9 deletionsREADME.md
- board_footprints.png 0 additions, 0 deletionsboard_footprints.png
- code/Project_Mouse.rs 426 additions, 0 deletionscode/Project_Mouse.rs
Pictures/board_footprints.png
0 → 100644
{kind=link}
87.5 KiB
Pictures/board_schematic.png
0 → 100644
{kind=link}
167 KiB
board_footprints.png
0 → 100644
{kind=link}
87.5 KiB
code/Project_Mouse.rs
0 → 100644